5. Efficient data batching
By default, PopTorch will process the batch_size which you provided to
the DataLoader. This value is known as the micro-batch
size.
When using the other options below, the actual number of samples used per step varies to allow the IPU(s) to process data more efficiently.
However, the effective batch size for operations which depend on it (for example the size of mini-batches, in PyTorch’s terminology, when using Pytorch’s BatchNorm layers) will not change. All that changes is how much data is actually sent for a single step.
Note
Failure to use DataLoader may result in
accidentally changing the effective batch size for operations which depend on
it, such as batch normalization.
PopTorch tutorial: Efficient data loading is a detailed tutorial regarding efficient data loading, batching and tuning relevant hyperparameters in PopTorch.
5.1. poptorch.DataLoader
PopTorch provides a thin wrapper around the traditional torch.utils.data.DataLoader
to abstract away some of the batch sizes calculations. If DataLoader
is used in a distributed execution environment, it will ensure that each process uses
a different subset of the dataset.
If you set the DataLoader batch_size to more than 1
then each operation in the model will process that number of elements at any
given time. Please see the usage example below.
5.2. poptorch.AsynchronousDataAccessor
To reduce host overhead you can offload the data loading process to a
separate thread by specifying mode=poptorch.DataLoaderMode.Async in the
DataLoader constructor. Internally this uses an
AsynchronousDataAccessor. Doing this allows you to reduce
the host/IPU communication overhead by using the time that the IPU is running
to load the next batch on the CPU. This means that when the IPU is finished
executing and returns to host the data will be ready for the IPU to pull in again.
1 opts = poptorch.Options()
2 opts.deviceIterations(device_iterations)
3 opts.replicationFactor(replication_factor)
4
5 loader = poptorch.DataLoader(opts,
6 ExampleDataset(shape=shape,
7 length=num_tensors),
8 batch_size=batch_size,
9 num_workers=num_workers,
10 mode=poptorch.DataLoaderMode.Async)
11
12 poptorch_model = poptorch.inferenceModel(model, opts)
13
14 for it, (data, _) in enumerate(loader):
15 out = poptorch_model(data)
Warning
Tensors being iterated over using an
AsynchronousDataAccessor use shared memory. You must clone
tensors at each iteration if you wish to keep their references outside of each
iteration.
Consider the following example:
predictions, labels = [], []
for data, label in dataloader:
predictions += poptorch_model(data)
labels += label
The predictions list will be correct because it’s producing a new tensor from the
inputs. However, The list labels will contain identical references. This line
would need to be replaced with the following:
labels += label.detach().clone()
5.2.1. Rebatching iterable datasets
There are two types of datasets in PyTorch : map-style datasets and iterable datasets.
As explained in the notes of PyTorch’s Data Loading Order and Sampler : for IterableDataset : “When fetching from iterable-style datasets with multi-processing, the drop_last argument drops the last non-full batch of each worker’s dataset replica.”
This means that if the number of elements is naively divided among the number of workers (which is the default behaviour) then potentially a significant number of elements will be dropped.
For example:
num_tensors = 100
num_workers = 7
batch_size = 4
per_worker_tensors = ceil(100 / num_workers) = 15
last_worker_tensors = 100 - (num_workers - 1) * per_worker_tensors = 10
num_tensors_used = batch_size * (floor(per_worker_tensors / batch_size) * (num_workers - 1) + floor(last_worker_tensors / batch_size))
= 80
This means in this particular case 20% of the dataset will never be used. But, in general the larger the number of workers and the batch size, the more data will end up being unused.
To work around this issue PopTorch has a mode=poptorch.DataLoaderMode.AsyncRebatched.
PopTorch will set the batch_size in the PyTorch Dataset and DataLoader to 1 and will instead create the batched tensors in its worker process.
The shape of the tensors returned by the DataLoader will be the same as before, but the number of used tensors from the dataset will increase to
floor(num_tensors / batch_size) * batch_size (which means all the tensors would be used in the example above).
Note
This flag is not enabled by default because the behaviour is different from the upstream DataLoader.
5.3. poptorch.Options.deviceIterations
When training, a device iteration corresponds to one iteration of the training
loop executed on the IPU, starting with data loading, followed by the forward
and backward passes, and ending with a weight update. If
gradient accumulation is not used then if you set
deviceIterations() to n, PopTorch will carry out
this loop n times (processing n micro-batches) on the IPU before returning
control to the host, which will improve processing efficiency. If gradient
accumulation is used then the number of micro-batches processed will be n
multiplied by the value set using
gradientAccumulation().
For inference, a device iteration corresponds to data loading and the forward pass.
Note that the returned output dimensions depend on
outputMode(). The default value for
trainingModel() is Final, since you will often not need to
receive all or any of the output tensors and it is more efficient not to
receive them. Therefore, only the last batch of data will be returned to the
host under this setting. You can change this behaviour by setting the value of
outputMode(). to All. This returns the result of
every batch to the host.
Note
When running an
inferenceModel with
PipelinedExecution, you must set
deviceIterations() to at least the number of
pipeline steps.
1from functools import reduce
2from operator import mul
3
4import torch
5import poptorch
6
7
8class ExampleModelWithLoss(torch.nn.Module):
9 def __init__(self, data_shape, num_classes):
10 super().__init__()
11
12 self.fc = torch.nn.Linear(reduce(mul, data_shape), num_classes)
13 self.loss = torch.nn.CrossEntropyLoss()
14
15 def forward(self, x, target=None):
16 reshaped = x.reshape([x.shape[0], -1])
17 fc = self.fc(reshaped)
18
19 if target is not None:
20 return fc, self.loss(fc, target)
21 return fc
22
23
24class ExampleDataset(torch.utils.data.Dataset):
25 def __init__(self, shape, length):
26 super().__init__()
27 self._shape = shape
28 self._length = length
29
30 self._all_data = []
31 self._all_labels = []
32
33 torch.manual_seed(0)
34 for _ in range(length):
35 label = 1 if torch.rand(()) > 0.5 else 0
36 data = torch.rand(self._shape) + label
37 data[0] = -data[0]
38 self._all_data.append(data)
39 self._all_labels.append(label)
40
41 def __len__(self):
42 return self._length
43
44 def __getitem__(self, index):
45 return self._all_data[index], self._all_labels[index]
46
47
48def device_iterations_example():
49 # Set the number of samples for which activations/gradients are computed
50 # in parallel on a single IPU
51 model_batch_size = 2
52
53 # Create a poptorch.Options instance to override default options
54 opts = poptorch.Options()
55
56 # Run a 100 iteration loop on the IPU, fetching a new batch each time
57 opts.deviceIterations(100)
58
59 # Set up the DataLoader to load that much data at each iteration
60 training_data = poptorch.DataLoader(opts,
61 dataset=ExampleDataset(shape=[3, 2],
62 length=10000),
63 batch_size=model_batch_size,
64 shuffle=True,
65 drop_last=True)
66
67 model = ExampleModelWithLoss(data_shape=[3, 2], num_classes=2)
68 # Wrap the model in a PopTorch training wrapper
69 poptorch_model = poptorch.trainingModel(model, options=opts)
70
71 # Run over the training data, 100 batches at a time (specified in
72 # opts.deviceIterations())
73 for batch_number, (data, labels) in enumerate(training_data):
74 # Execute the device with a 100 iteration loop of batchsize 2.
75 # "output" and "loss" will be the respective output and loss of the
76 # final batch (the default OutputMode).
77
78 output, loss = poptorch_model(data, labels)
79 print(f"{labels[-1]}, {output}, {loss}")
5.4. poptorch.Options.replicationFactor
replicationFactor() will replicate the model over
multiple IPUs to allow automatic data parallelism across many IPUs.
1def replication_factor_example():
2 # Set the number of samples for which activations/gradients are computed
3 # in parallel on a single IPU
4 model_batch_size = 2
5 # replication_start
6 # Create a poptorch.Options instance to override default options
7 opts = poptorch.Options()
8
9 # Run a 100 iteration loop on the IPU, fetching a new batch each time
10 opts.deviceIterations(100)
11
12 # Duplicate the model over 4 replicas.
13 opts.replicationFactor(4)
14
15 training_data = poptorch.DataLoader(opts,
16 dataset=ExampleDataset(shape=[3, 2],
17 length=100000),
18 batch_size=model_batch_size,
19 shuffle=True,
20 drop_last=True)
21
22 model = ExampleModelWithLoss(data_shape=[3, 2], num_classes=2)
23 # Wrap the model in a PopTorch training wrapper
24 poptorch_model = poptorch.trainingModel(model, options=opts)
25
26 # Run over the training data, 100 batches at a time (specified in
27 # opts.deviceIterations())
28 for batch_number, (data, labels) in enumerate(training_data):
29 # Execute the device with a 100 iteration loop of model batchsize 2
30 # across 4 IPUs (global batchsize = 2 * 4 = 8). "output" and "loss"
31 # will be the respective output and loss of the final batch of each
32 # replica (the default OutputMode).
33 output, loss = poptorch_model(data, labels)
34 print(f"{labels[-1]}, {output}, {loss}")
5.5. poptorch.Options.inputReplicaGrouping
inputReplicaGrouping() allows the input batches to
be split between groups of replicas, in a similar way to what
replicaGrouping() does for weight tensors. See
Section 4.4.3, Grouping tensor weights across replicas.
5.6. poptorch.Options.Training.gradientAccumulation
You can use
gradientAccumulation()
to run a number of micro-batches before updating parameters (weights) during
training. The number of gradient accumulations is equal to the number of
micro-batches (batches whose size is specified as the batch_size value
provided to the DataLoader) which are processed between
model updates. After accumulation, PopTorch updates the model using the
gradients accumulated from processing all the batches.
Note
When running an inferenceModel, you must set
gradientAccumulation() to 1.
As mentioned in pipelined_execution, you need to use gradient
accumulations when training with PipelinedExecution
because the parameters can only be updated between pipeline runs. You need to
set the number of accumulations to at least the number of pipeline stages.
However, with this value, the pipeline will switch into the “ramp-down”
period as soon as it has finished the “ramp-up” period. Using a larger number
of gradient accmumulations means that the pipeline will run at full efficiency
for longer. However, the increase in batches between parameter updates may
reduce the overall training efficiency of your model. The optimal number of
gradient accumulations is a trade off between these two factors.
Note
gradientAccumulation()
is only needed by PipelinedExecution. Other execution
modes may benefit from it because the IPUs will spend less time updating
parameters during training.
1def gradient_accumulation_example():
2 # Set the number of samples for which activations/gradients are computed
3 # in parallel on a single IPU
4 model_batch_size = 2
5 # Create a poptorch.Options instance to override default options
6 opts = poptorch.Options()
7
8 # Run a 400 iteration loop on the IPU, fetching a new batch each time
9 opts.deviceIterations(400)
10
11 # Accumulate the gradient 8 times before applying it.
12 opts.Training.gradientAccumulation(8)
13
14 training_data = poptorch.DataLoader(opts,
15 dataset=ExampleDataset(shape=[3, 2],
16 length=100000),
17 batch_size=model_batch_size,
18 shuffle=True,
19 drop_last=True)
20
21 # Wrap the model in a PopTorch training wrapper
22 poptorch_model = poptorch.trainingModel(model, options=opts)
23
24 # Run over the training data, 400 batches at a time (specified in
25 # opts.deviceIterations())
26 for batch_number, (data, labels) in enumerate(training_data):
27 # Execute the device with a 100 iteration loop of model batchsize 2
28 # with gradient updates every 8 iterations (global batchsize = 2 * 8 = 16).
29 # "output" and "loss" will be the respective output and loss of the
30 # final batch of each replica (the default OutputMode).
31 output, loss = poptorch_model(data, labels)
32 print(f"{labels[-1]}, {output}, {loss}")
In the code example below, Block introduced in
Section 4.4, Multi-IPU execution strategies is used to divide up
a different model into disjoint subsets of layers.
These blocks can be shared among multiple parallel execution strategies.
1class Network(nn.Module):
2 def __init__(self):
3 super(Network, self).__init__()
4 self.layer1 = nn.Linear(784, 784)
5 self.layer2 = nn.Linear(784, 784)
6 self.layer3 = nn.Linear(784, 128)
7 self.layer4 = nn.Linear(128, 10)
8 self.softmax = nn.Softmax(1)
9
10 def forward(self, x):
11 x = x.view(-1, 784)
12 with poptorch.Block("B1"):
13 x = self.layer1(x)
14 with poptorch.Block("B2"):
15 x = self.layer2(x)
16 with poptorch.Block("B3"):
17 x = self.layer3(x)
18 with poptorch.Block("B4"):
19 x = self.layer4(x)
20 x = self.softmax(x)
21 return x
22
23
24class TrainingModelWithLoss(torch.nn.Module):
25 def __init__(self, model):
26 super().__init__()
27 self.model = model
28 self.loss = torch.nn.CrossEntropyLoss()
29
30 def forward(self, args, loss_inputs=None):
31 output = self.model(args)
32 if loss_inputs is None:
33 return output
34 with poptorch.Block("B4"):
35 loss = self.loss(output, loss_inputs)
36 return output, loss
37
38
You can see the code examples of SerialPhasedExecution,
PipelinedExecution, and
ShardedExecution below.
An instance of class PipelinedExecution defines an
execution strategy that assigns layers to multiple IPUs as a pipeline. Gradient
accumulation is used to push multiple batches through the pipeline allowing
IPUs to run in parallel.
1 training_data, test_data = get_mnist_data(opts)
2 model = Network()
3 model_with_loss = TrainingModelWithLoss(model)
4 model_opts = poptorch.Options().deviceIterations(1)
5 if opts.strategy == "phased":
6 strategy = poptorch.SerialPhasedExecution("B1", "B2", "B3", "B4")
7 strategy.stage("B1").ipu(0)
8 strategy.stage("B2").ipu(0)
9 strategy.stage("B3").ipu(0)
10 strategy.stage("B4").ipu(0)
11 model_opts.setExecutionStrategy(strategy)
12 elif opts.strategy == "pipelined":
13 strategy = poptorch.PipelinedExecution("B1", "B2", "B3", "B4")
14 strategy.stage("B1").ipu(0)
15 strategy.stage("B2").ipu(1)
16 strategy.stage("B3").ipu(2)
17 strategy.stage("B4").ipu(3)
18 model_opts.setExecutionStrategy(strategy)
19 model_opts.Training.gradientAccumulation(opts.batches_per_step)
20 else:
21 strategy = poptorch.ShardedExecution("B1", "B2", "B3", "B4")
22 strategy.stage("B1").ipu(0)
23 strategy.stage("B2").ipu(0)
24 strategy.stage("B3").ipu(0)
25 strategy.stage("B4").ipu(0)
26 model_opts.setExecutionStrategy(strategy)
27
28 if opts.offload_opt:
29 model_opts.TensorLocations.setActivationLocation(
30 poptorch.TensorLocationSettings().useOnChipStorage(True))
31 model_opts.TensorLocations.setWeightLocation(
32 poptorch.TensorLocationSettings().useOnChipStorage(True))
33 model_opts.TensorLocations.setAccumulatorLocation(
34 poptorch.TensorLocationSettings().useOnChipStorage(True))
35 model_opts.TensorLocations.setOptimizerLocation(
36 poptorch.TensorLocationSettings().useOnChipStorage(False))
37
38 training_model = poptorch.trainingModel(
39 model_with_loss,
40 model_opts,
41 optimizer=optim.AdamW(model.parameters(), lr=opts.lr))
42
43 # run training, on IPU
44 train(training_model, training_data, opts)
Fig. 5.1 shows the pipeline execution for multiple batches on IPUs. There are 4 pipeline stages running on 4 IPUs respectively. Gradient accumulation enables us to keep the same number of pipeline stages, but with a wider pipeline. This helps hide the latency, which is the total time for one item to go through the whole system, as highlighted.
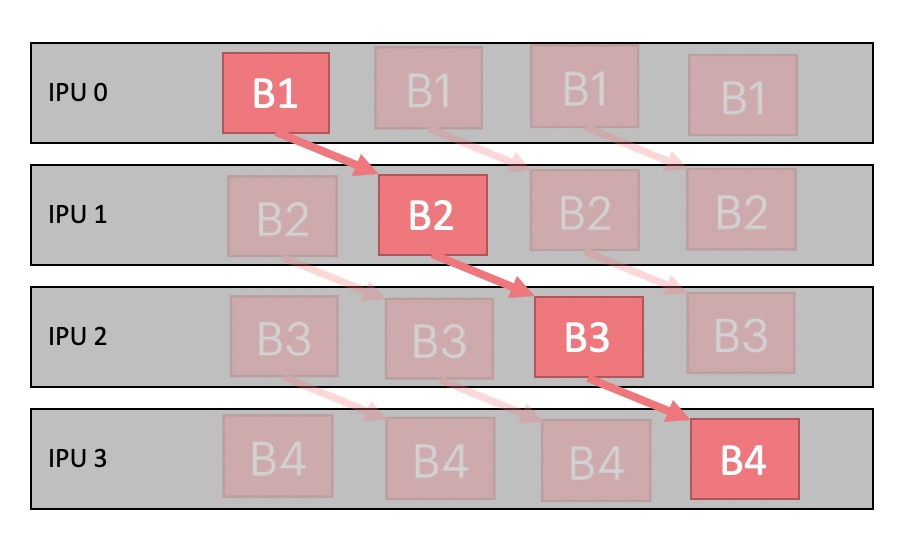
Fig. 5.1 Pipeline execution with gradient accumulation
5.7. poptorch.Options.outputMode
When you use a inferenceModel(), you will usually want to
receive all the output tensors. For this reason, PopTorch will return them
all to you by default. However, you can change this behaviour using
outputMode().
When you use a trainingModel(), you will often not need to
receive all or any of the output tensors and it is more efficient not to
receive them. For this reason, PopTorch only returns the last batch of tensors
by default. As in the the case of inferenceModel, you can change this
behaviour using outputMode().
If you want to monitor training using a metric such as loss or accuracy, you
may wish to take into account all tensors. To do this with minimal or no
overhead, you can use poptorch.OutputMode.Sum. For example:
1class MulticlassPerceptron(torch.nn.Module): 2 def __init__(self, vec_length, num_classes): 3 super().__init__() 4 self.fc = torch.nn.Linear(vec_length, num_classes) 5 self.loss = torch.nn.CrossEntropyLoss() 6 7 def forward(self, x, target): 8 fc = self.fc(x) 9 10 classification = torch.argmax(fc, dim=-1) 11 accuracy = (torch.sum((classification == target).to(torch.float)) / 12 float(classification.numel())) 13 14 if self.training: 15 return self.loss(fc, target), accuracy 16 17 return classification, accuracy1opts = poptorch.Options() 2 3opts.deviceIterations(5) 4opts.Training.gradientAccumulation(10) 5opts.outputMode(poptorch.OutputMode.Sum) 6 7training_data = poptorch.DataLoader(opts, 8 dataset=ExampleClassDataset( 9 NUM_CLASSES, VEC_LENGTH, 2000), 10 batch_size=5, 11 shuffle=True, 12 drop_last=True) 13 14 15model = MulticlassPerceptron(VEC_LENGTH, NUM_CLASSES) 16model.train() 17 18# Wrap the model in a PopTorch training wrapper 19poptorch_model = poptorch.trainingModel(model, 20 options=opts, 21 optimizer=torch.optim.Adam( 22 model.parameters())) 23 24# Run over the training data, 5 batches at a time. 25for batch_number, (data, labels) in enumerate(training_data): 26 # Execute the device with a 5 iteration loop of batchsize 5 with 10 27 # gradient accumulations (global batchsize = 5 * 10 = 50). "loss" and 28 # "accuracy" will be the sum across all device iterations and gradient 29 # accumulations but not across the model batch size. 30 _, accuracy = poptorch_model(data, labels) 31 32 # Correct for iterations 33 # Do not divide by batch here, as this is already accounted for in the 34 # PyTorch Model. 35 accuracy /= (opts.device_iterations * opts.Training.gradient_accumulation) 36 print(f"Accuracy: {float(accuracy)*100:.2f}%")