Source (GitHub) | Download notebook
2.6. PopTorch Parallel Execution Using Pipelining
This PopTorch tutorial demonstrates how to train and test a neural network on the MNIST dataset by splitting the model over several IPUs and using pipelining to make efficient use of all the available IPUs. Pipelining is the recommended strategy when a model is too large to fit into the memory of a single IPU. Pipelining can be used by training and inference models. You will see both scenarios applied to the MNIST simple application.
There are two parts: a Jupyter notebook and a Python script. The notebook works through how you use the pipelining API to define pipelines in PopTorch. The mnist_pipeline.py script shows the effect of hyper-parameters on a pipelined model’s execution schedule when the model is run on the IPU.
In this tutorial you will:
Use the PopTorch pipelining API to execute a model over multiple IPUs in parallel.
Partition a model into blocks (
poptorch.Block) and group them into pipeline stages (poptorch.Stage).Learn how gradient accumulation and device iteration hyperparameters impact performance.
Debug a multi-IPU model using a sharded execution schedule (
poptorch.ShardedExecution).Learn how to offload the optimiser tensors to save memory on device.
Use the Popvision Graph Analyser to look at execution profiles and understand how pipelining impacts the scheduling of a model across IPUs.
If you are unfamiliar with PopTorch, you may want to check out our tutorial introducing PopTorch and learn how to convert a model from PyTorch to PopTorch to make it run on a Graphcore IPU. Additionally, some knowledge of data loading in poptorch and batching on IPU is helpful, these topics are covered in our tutorial on efficient data loading.
File structure
mnist_pipeline.pyThe main example script.walkthrough.ipynbThe Jupyter notebook for this tutorial.README.mdThe markdown version of this tutorial.walkthrough.pyThe tutorial annotated script (for notebook generation only).walkthrough_code_only.pyThe tutorial code only (for notebook generation only).requirements.txtThe packages to be installed in order to run the code.tests/The unit tests formnist_pipeline.py.
Requirements:
Python 3 installed (we recommend to create a virtual environment).
A Poplar SDK environment enabled (see the Getting Started guide for your IPU system)
Python packages installed with
python3 -m pip install -r requirements.txt
To run the Jupyter notebook:
Enable a Python3 virtual environment and install the required packages with
python3 -m pip install -r requirements.txtSource the enable scripts for both Poplar and PopART (see the Getting Started guide for your IPU system)
In the same virtual environment, install the Jupyter notebook server:
python3 -m pip install jupyterLaunch the Jupyter server on a specific port:
jupyter-notebook --no-browser --port <port number>Connect via SSH to your remote machine, forwarding your chosen port:
ssh -NL <port number>:localhost:<port number> <your username>@<remote machine>
For more details about this process, or if you need troubleshooting, see our guide on using IPUs from Jupyter notebooks.
Note: In the Python script of this tutorial
mnist_pipeline.py, the main function is executed under the scope:if __name__ == '__main__':This is necessary to avoid issues with asynchronous DataLoader. Implications of the asynchronous data loader are covered in our tutorial on efficient data loading
Introduction to pipelined execution
PopTorch provides the pipelining API to split a model over several IPUs and parallelise its execution. This is the recommended strategy when a model does not fit into the memory of a single IPU. To pipeline a model:
the model must be partitioned into multiple stages;
the pipelined execution strategy must be selected, it will coordinate how the different stages are executed. This process is an example of model parallelism.
A pipeline stage groups several consecutive layers of the full model to be executed on the same IPU. Each stage is placed on an IPU, when training, stages contain both the code for the forward and the backward passes. Activations corresponding to a batch of data will pass through all the stages during the forward pass, before going back through the stages in reverse order during the backward pass. By placing the stages on different IPUs, and by feeding enough mini-batches, all the stages will process a batch of data concurrently after a “ramp-up” period.
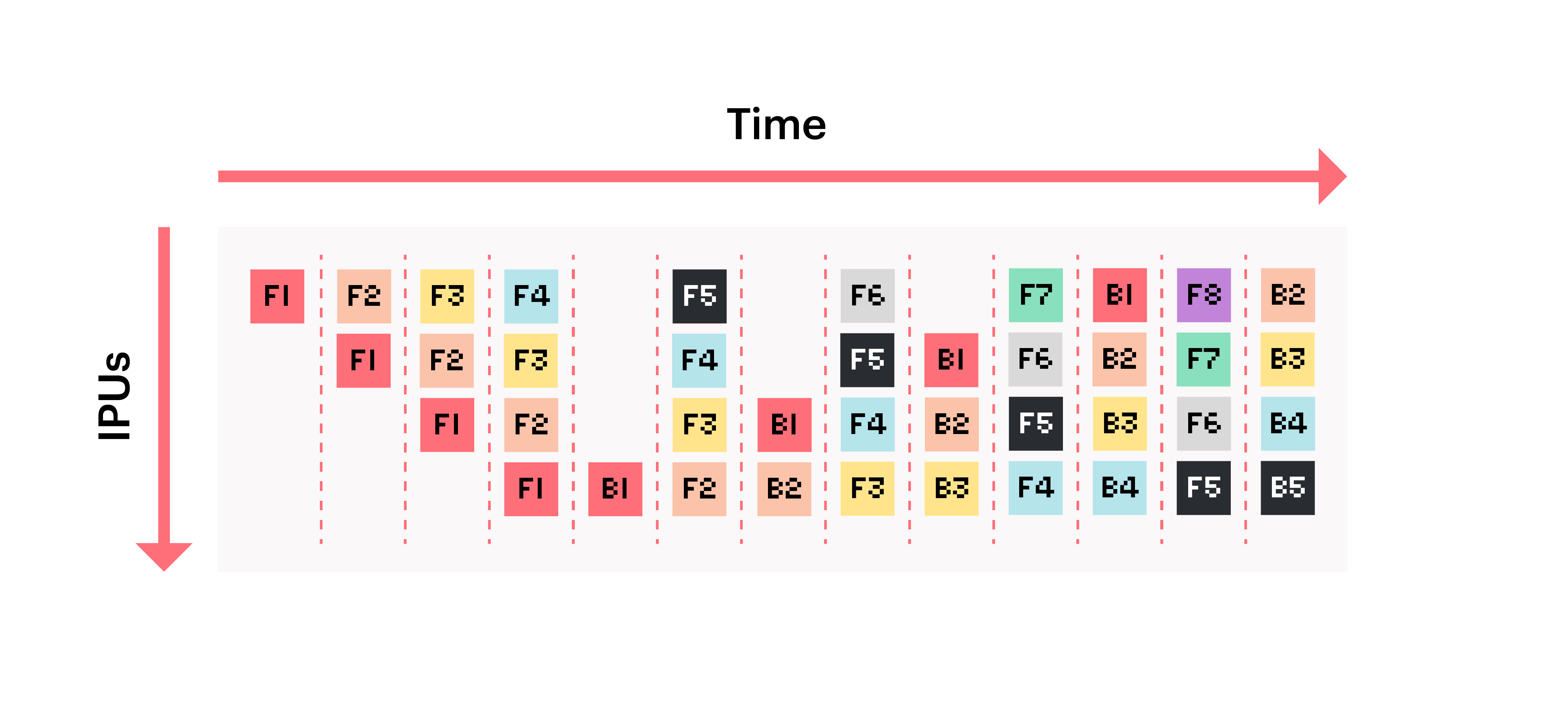
The figure above illustrates the start of a pipelined training on 4 IPUs.
Each block represents a batch of data being processed (numbered from 1 to 8).
Blocks are marked with F when the IPU is executing the forward pass and B when it
is executing the backward pass. We can see that after nine steps, the pipeline reaches a point
where all the IPUs are used at the same time.
In general, a pipeline reaches steady state and full utilisation after 2N+1 steps where N is the number of IPUs.
For each stage, forward and backward passes are always executed on the same IPU.
Beyond pipelined execution, other execution strategies are available which offer different performance and memory tradeoffs, these are beyond the scope of this tutorial but are covered in the multi-IPU execution strategies section of the PopTorch documentation.
For this tutorial, we need to import the following packages.
import os
import json
import argparse
from pkgutil import get_data
import sys
from tqdm import tqdm
import torch
import torch.nn as nn
import torchvision
import poptorch
Setting hyperparameters
We are going to use the following hyperparameters. Let’s set their default values.
learning_rate = 0.001
epochs = 3
batch_size = 40
test_batch_size = 8
training_iterations = 10
gradient_accumulation = 10
inference_iterations = 100
Preparing the data
We need to get the MNIST dataset for training or inference.
MNIST contains 70,000 images of handwritten digits: 60,000 for training and
10,000 for testing. The images are grayscale with a resolution of 28x28 pixels.
Two data loaders are employed to load training and testing data sets
separately:
the train argument is set to True for training, and False
for testing. Furthermore, training and inference can load the data
using a specific batch size.
torchvision.transforms.ToTensor() converts the image into numbers,
representing the brightness of their color between 0 and 255, separately in
red, green and blue images.
torchvision.transforms.Normalize()
normalizes the tensor using the statistics from the MNIST dataset.
train_dataset = torchvision.datasets.MNIST(
"mnist_data/",
train=True,
download=True,
transform=torchvision.transforms.Compose(
[
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize((0.1307,), (0.3081,)),
]
),
)
test_dataset = torchvision.datasets.MNIST(
"mnist_data/",
train=False,
download=True,
transform=torchvision.transforms.Compose(
[
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize((0.1307,), (0.3081,)),
]
),
)
poptorch.DataLoader
is used to efficiently load data batches to IPU.
More information about the use of poptorch.Dataloader
can be found in the PopTorch tutorial on efficient data loading.
poptorch.DataLoaderMode.Async is the preferred mode as it can
utilize several CPU threads to accelerate data processing. This can reduce
the host and IPU communication time.
The datasets will be downloaded, shuffled and transformed.
A poptorch.Options() instance contains a set of default hyperparameters and options for the IPU.
This is used both by the model and the PopTorch DataLoader.
We change the default value of deviceIterations: 10 for training and 100 for inference.
For training with pipelined execution, we also set gradientAccumulation to 10 (described in Pipelined execution section).
With these settings, both data loaders will pick 100 mini-batches of data per step.
train_opts = poptorch.Options()
train_opts.deviceIterations(training_iterations)
train_opts.Training.gradientAccumulation(gradient_accumulation)
training_data = poptorch.DataLoader(
train_opts,
train_dataset,
batch_size=batch_size,
shuffle=True,
mode=poptorch.DataLoaderMode.Async,
num_workers=16,
)
test_data = poptorch.DataLoader(
poptorch.Options().deviceIterations(inference_iterations),
test_dataset,
batch_size=test_batch_size,
shuffle=True,
drop_last=True,
mode=poptorch.DataLoaderMode.Async,
num_workers=16,
)
Model definition
A model needs to be created for the neural network to train on MNIST data.
We start by defining a Module class
called ConvLayer that is a basic convolution block for our model. It contains
Conv2D, MaxPool2d and ReLU operations.
class ConvLayer(nn.Module):
def __init__(self, in_channels, num_filters, kernel_size, pool_size):
super().__init__()
self.conv = nn.Conv2d(in_channels, num_filters, kernel_size=kernel_size)
self.pool = nn.MaxPool2d(kernel_size=pool_size)
self.relu = nn.ReLU()
def forward(self, x):
x = self.conv(x)
x = self.pool(x)
x = self.relu(x)
return x
To use pipelined execution we must split our model using block annotations. To provide flexibility, PopTorch lets us split our model into blocks and we can decide later how to group these blocks into multiple stages to place them on different IPUs.
Annotation for model partitioning
To prepare a model for pipelining, we need to partition the computational graph into multiple blocks.
They will be used later to build the stages that will be
executed on different IPUs. The picture below illustrates this process.
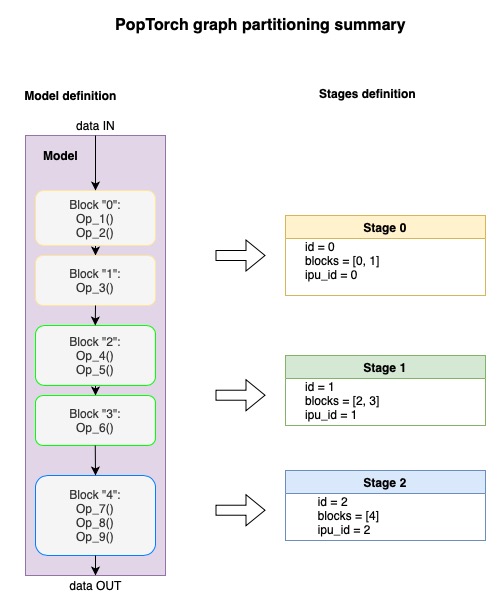
As described in the User Guide, there are three ways to define blocks:
using the poptorch.Block scope;
using the poptorch.BlockFunction decorator on the forward method of a
Module;wrapping layers with poptorch.BeginBlock.
You can use a combination of these three annotation options.
In this tutorial we will use the poptorch.Block scope.
To do this, we modify the forward function of the Network class, wrapping each layer
under the scope of a poptorch.Block with a name: B1, B2, B3 and B4.
We define a model called Network. It defines four layers using
ConvLayer, Linear and ReLU, where ConvLayer was created above.
class Network(nn.Module):
def __init__(self):
super().__init__()
self.layer1 = ConvLayer(1, 10, 5, 2)
self.layer2 = ConvLayer(10, 20, 5, 2)
self.layer3 = nn.Linear(320, 256)
self.layer3_act = nn.ReLU()
self.layer4 = nn.Linear(256, 10)
def forward(self, x):
with poptorch.Block("B1"):
x = self.layer1(x)
with poptorch.Block("B2"):
x = self.layer2(x)
with poptorch.Block("B3"):
x = x.view(-1, 320)
x = self.layer3_act(self.layer3(x))
with poptorch.Block("B4"):
x = self.layer4(x)
return x
model = Network()
Defining the training model
Since the loss function is only needed for training,
we create a Module class called TraingModelWithLoss to
integrate the model and the loss function which is
CrossEntropyLoss in this example.
We add the loss to the same block as the last layer of the model.
In the forward function of TrainingModelWithLoss below,
the loss is annotated with poptorch.Block of B4.
class TrainingModelWithLoss(torch.nn.Module):
def __init__(self, model):
super().__init__()
self.model = model
self.loss = torch.nn.CrossEntropyLoss()
def forward(self, args, labels=None):
output = self.model(args)
if labels is None:
return output
with poptorch.Block("B4"):
loss = self.loss(output, labels)
return output, loss
The training model is called with an instance of
TrainingModelWithLoss, model options, and the AdamW optimiser.
The next section of this tutorial will explain how to set the model options for pipelining.
def get_training_model(opts, model):
"""Wrap a model with the loss and the optimiser into a poptorch.trainingModel"""
model_with_loss = TrainingModelWithLoss(model)
training_model = poptorch.trainingModel(
model_with_loss,
opts,
optimizer=poptorch.optim.AdamW(model.parameters(), lr=learning_rate),
)
return training_model
Execution strategies
Now that we have split the model into blocks, we are ready to define stages and place them onto specific IPUs. Then we will apply an execution strategy which will schedule the stages on the IPUs. We will consider two execution strategies:
poptorch.PipelinedExecution for efficient parallel utilisation;
and poptorch.ShardedExecution for debugging multi-IPU models.
Note: This tutorial does not cover poptorch.PhasedExecution strategy, which is the third one available.
The chosen strategy will be set in the model options, which are initialized by
poptorch.Options.
train_opts = poptorch.Options()
Pipelined execution (parallel)
Assigning blocks to stages and IPUs
The blocks defined earlier now need to be assembled into stages and passed to the poptorch.PipelinedExecution strategy object. This object defines a pipeline which enables parallel execution.
A stage is created by instantiating a poptorch.Stage object and giving it one or more block names.
These stages are then placed on specific IPUs identified by indices from 0 to 3.
In this example, we set 4 stages with poptorch.PipelinedExecution to have one stage per IPU.
pipelined_strategy = poptorch.PipelinedExecution(
poptorch.Stage("B1").ipu(0),
poptorch.Stage("B2").ipu(1),
poptorch.Stage("B3").ipu(2),
poptorch.Stage("B4").ipu(3),
)
Next, we set pipelining as the execution strategy in our training options.
train_opts.setExecutionStrategy(pipelined_strategy)
replication_factor=1Options(, broadcast_buffers=TrueOptions(, device_iterations=1Options(, log_dir='.'Options(, auto_round_num_ipus=FalseOptions(, anchored_tensors={}Options(, output_mode=4Options(, output_return_period=1Options(, connection_type=0Options(, sync_pattern=0Options(, available_memory_proportion={}Distributed=_DistributedOptions(num_distributed_processes=1, distributed_process_id=0, ipuof_configs={}, _gcd_mappings={}, _warnings={}, _warnings_disabled=set(), _is_frozen=False), , Jit=_JitOptions(trace_model=False, _warnings={}, _warnings_disabled=set(), _is_frozen=False), , Precision=_PrecisionOptions(autocast_enabled=True, autocast_policy=<poptorch.autocasting.Policy object at 0x7f5b69496780>, autocast_policy_dict={'fp16': ['addbmm', 'addmm', 'addmv', 'addr', 'baddbmm', 'bmm', 'at', 'conv1d', 'conv2d', 'conv3d', 'conv_tbc', 'conv_transpose1d', 'conv_transpose2d', 'conv_transpose3d', 'convolution', 'matmul', 'mm', 'mv'], 'fp32': [], 'promote': ['addcdiv', 'addcmul', 'atan2', 'bilinear', 'cat', 'cross', 'dot', 'equal', 'index_put', 'stack', 'at'], 'demote': []}, half_float_casting=<HalfFloatCastingBehavior.Default: 2>, _popart_options=_PopartOptions(instrumentWithHardwareCycleCounter=False, rearrangeAnchorsOnHost=False), _warnings={}, _warnings_disabled=set(), _is_frozen=False), , TensorLocations=_TensorLocationOptions(, _warnings={}, _warnings_disabled=set(), _is_frozen=False), , Training=_TrainingOptions(gradient_accumulation=1, accumulation_and_replication_reduction_type=<ReductionType.Mean: 1>, meanAccumulationAndReplicationReductionStrategy=<MeanReductionStrategy.Post: 1>, _popart_options=_PopartOptions(instrumentWithHardwareCycleCounter=False, rearrangeAnchorsOnHost=False), _warnings={}, _warnings_disabled=set(), _is_frozen=False), , _Popart=_PopartOptions(instrumentWithHardwareCycleCounter=False, rearrangeAnchorsOnHost=False))
Note: Since IPUs are all set in order from 0 to 3, this shorter notation can also be used to, both, set the execution strategy and place the stages on the IPUs:
train_opts.setExecutionStrategy(poptorch.PipelinedExecution("B1", "B2", "B3", "B4"))
Instead of naming blocks, we could have placed them directly on specific IPUs by using the ipu_id argument in the poptorch.Block context manager.
In that case PopTorch supports auto-staging which will automatically define one stage per block, placing each block on the specified IPU.
PipelinedExecution and AutoStage are enabled by default in models which contain poptorch.Block contexts, decorators or poptorch.BeginBlock layers.
Explicitly setting stages, as done in this tutorial, is required when ipu_id is not set.
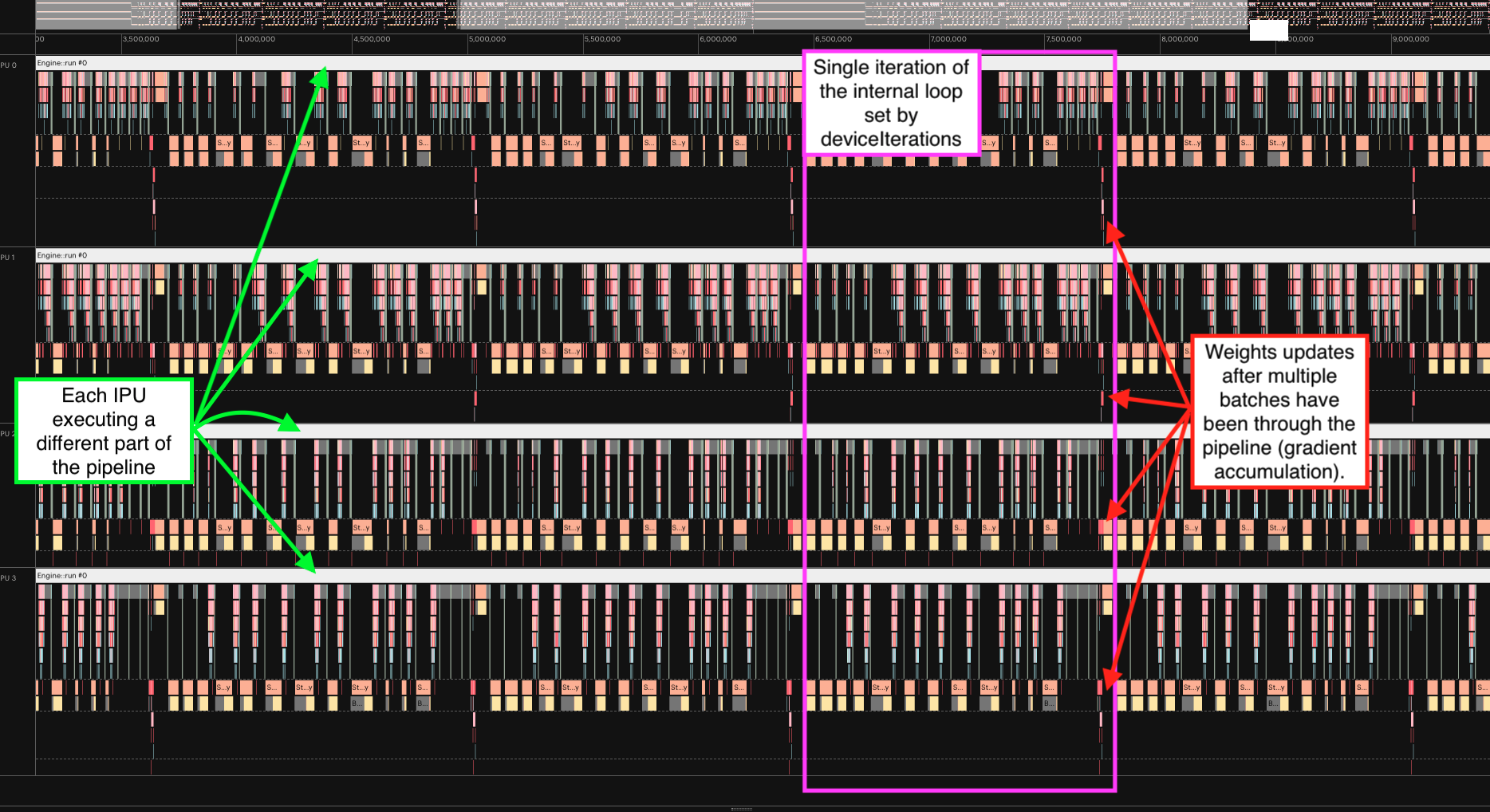
Setting gradient accumulation and device iterations
Parallelisation during pipelined execution requires both the deviceIterations and gradientAccumulation hyper-parameters to be set.
gradientAccumulationis used to push multiple mini-batches through the pipeline allowing IPUs to run multiple stages in parallel. During the backward pass, the gradients are accumulated over several mini-batches. The model parameters are only updated once the number of consecutive mini-batches set byopts.Training.gradientAccumulation()have been processed; their gradients are averaged.deviceIterationsdefines the number of times the device should run over the data before returning to the user. This is equivalent to running the IPU in a loop over that specified number of iterations, with new mini-batches of data each time. However, increasingdeviceIterationsimproves efficiency by reducing the number of interactions between the host CPU and the IPU.
As a result, from the CPU point of view, the number of images used by a single call to the model will be equal to: batch-size * gradientAccumulation *deviceIterations.
The implications of these parameters on I/O efficiency and data batching are covered in detail in the tutorial on efficient data loading in PopTorch.
train_opts.deviceIterations(training_iterations)
train_opts.Training.gradientAccumulation(gradient_accumulation)
_TrainingOptions(gradient_accumulation=10, accumulation_and_replication_reduction_type=<ReductionType.Mean: 1>, meanAccumulationAndReplicationReductionStrategy=<MeanReductionStrategy.Post: 1>, _popart_options=_PopartOptions(instrumentWithHardwareCycleCounter=False, rearrangeAnchorsOnHost=False), _warnings={}, _warnings_disabled=set(), _is_frozen=False)
The following execution profile illustrates how these parameters affect the computation on IPUs.
To generate your own profile, call the example script mnist_pipeline.py with
the --profile argument, you will find complete usage instructions for this
script at the end of the tutorial.
This option will generate profile.pop files which can be opened with the
Popvision Graph Analyser.
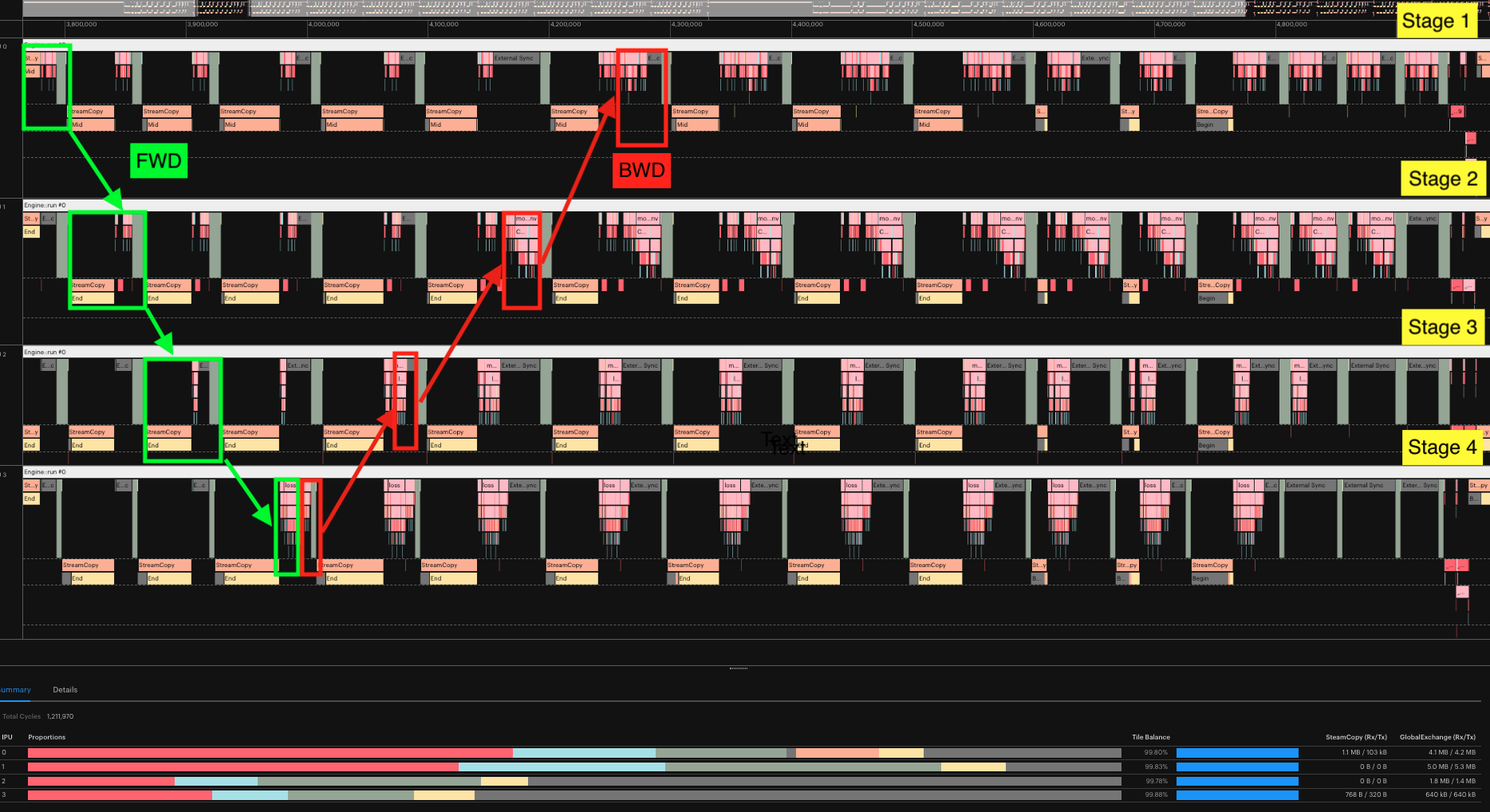
The execution report below illustrates the pipeline for 10 mini-batches on 4 IPUs. We can see the 4 stages, each on a different IPU. We highlighted the progression of the first batch:
Green for the forward pass.
Red for the backward pass. We see that after a few mini-batches, the stages are computing a forward pass directly followed by a backward pass.
Depending on your model and your performance target, you may need to balance the pipeline stages in terms of the amount of computation and the amount of memory demanded.
Efficient model partitioning (advanced)
In order to make efficient use of multiple IPUs using pipelining, we consider the position of the start and end of each stage. We must have in mind that these partitions will be placed and executed on different IPUs and the way we split our model will directly impact the memory and performance on each stage. The following trade-offs must be considered:
Stages must fit in memory considering both live and not always live memory. The PopVision Liveness report can help determine which Ops and tensors consume the most memory.
Stages must have similar execution times to avoid IPUs standing idle while another IPU completes its computation. The execution time of the longest stage determines the duration of one step. The PopVision execution trace can be used to identify imbalanced stages.
Inter-IPU communication is slower than memory access within a single IPU and should be minimised.
To achieve more efficient pipelines, you may want to have more poptorch.Block annotations to allow finer control of the partitioning.
At the Stage level, you can reorganize which blocks are assigned to each stage using the following format:
pipelined_strategy = poptorch.PipelinedExecution(
poptorch.Stage("B1", "B2").ipu(0), poptorch.Stage("B3", "B4").ipu(1)
)
This format places two blocks into two stages onto two IPUs instead of the four used earlier in the tutorial.
More information on splitting models for pipelining are available in the memory and performance optimisation guide, and the TensorFlow pipelining technical note.
Saving memory by offloading to remote buffers (advanced)
To fit a memory intensive model on IPUs, variables can be offloaded to the host to reduce the live memory.
Activations, weights, the accumulator
and the optimiser can either stay on the IPU or be copied to the host.
It is most efficient to keep them on the IPU but has higher memory
requirements. For larger models, offloading some variables
to the host memory can accommodate other variables on device memory, but it will also
increase the computation time of the weight update as more time is
spent communicating with the host.
In this code example, you can see how to set the storage on the device or host
memory. We kept the default activations, weights, and accumulator on the device,
while storing optimiser states to the host memory
using poptorch.Option.TensorLocations.
The AdamW optimiser is used in this tutorial and its optimiser state variables
do not need to be stored in the device memory during the forward and backward
propagation of the model.
These variables are only required during the weight update and so they are
streamed onto the device during the weight update and then streamed back to
the host memory after they have been updated.
train_opts.TensorLocations.setOptimizerLocation(
poptorch.TensorLocationSettings().useOnChipStorage(False)
)
_TensorLocationOptions(location_optimizer={'onChip': 0}, _warnings={}, _warnings_disabled=set(), _is_frozen=False)
Training the model
Once we have the training model, we run the training on the MNIST dataset,
prepared in the first step.
There are two nested for loops to traverse epochs and batches respectively.
After calling training_model(), predictions and losses are returned.
The accuracy and the mean of losses are calculated and displayed.
def train(training_model, training_data):
nr_steps = len(training_data)
for epoch in range(1, epochs + 1):
print(f"Epoch {epoch}/{epochs}")
bar = tqdm(training_data, total=nr_steps)
for data, labels in bar:
preds, losses = training_model(data, labels)
mean_loss = torch.mean(losses).item()
acc = accuracy(preds, labels)
bar.set_description(f"Loss:{mean_loss:0.4f} | Accuracy:{acc:0.2f}%")
The accuracy() function calculates the percentage of
the correct predictions for labels.
def accuracy(predictions, labels):
_, ind = torch.max(predictions, 1)
labels = labels[-predictions.size()[0] :]
accuracy = torch.sum(torch.eq(ind, labels)).item() / labels.size()[0] * 100.0
return accuracy
When we call training_model(), the outputs are not returned for every
mini-batch by default. This results in incomplete evaluation and inaccurate
training accuracy. This behaviour can be changed by modifying
outputMode
in poptorch.Options(). For performance reasons, PopTorch uses
OutputMode.Final by default. It only returns the final batch loss and
predictions to the host machine. We can set this to OutputMode.All to be able
to present the full information in this tutorial. In that case, preds and
losses will be lists containing the results for the 100 mini-batches passed to
the pipeline. However, this has an impact on the speed of training, due to the
overhead of transferring more data to the host machine.
# Warning: impacts performance
train_opts.outputMode(poptorch.OutputMode.All)
replication_factor=1Options(, broadcast_buffers=TrueOptions(, device_iterations=10Options(, log_dir='.'Options(, auto_round_num_ipus=FalseOptions(, anchored_tensors={}Options(, output_mode=2Options(, output_return_period=1Options(, connection_type=0Options(, sync_pattern=0Options(, available_memory_proportion={}Distributed=_DistributedOptions(num_distributed_processes=1, distributed_process_id=0, ipuof_configs={}, _gcd_mappings={}, _warnings={}, _warnings_disabled=set(), _is_frozen=False), , Jit=_JitOptions(trace_model=False, _warnings={}, _warnings_disabled=set(), _is_frozen=False), , Precision=_PrecisionOptions(autocast_enabled=True, autocast_policy=<poptorch.autocasting.Policy object at 0x7f5b69496780>, autocast_policy_dict={'fp16': ['addbmm', 'addmm', 'addmv', 'addr', 'baddbmm', 'bmm', 'at', 'conv1d', 'conv2d', 'conv3d', 'conv_tbc', 'conv_transpose1d', 'conv_transpose2d', 'conv_transpose3d', 'convolution', 'matmul', 'mm', 'mv'], 'fp32': [], 'promote': ['addcdiv', 'addcmul', 'atan2', 'bilinear', 'cat', 'cross', 'dot', 'equal', 'index_put', 'stack', 'at'], 'demote': []}, half_float_casting=<HalfFloatCastingBehavior.Default: 2>, _popart_options=_PopartOptions(instrumentWithHardwareCycleCounter=False, rearrangeAnchorsOnHost=False), _warnings={}, _warnings_disabled=set(), _is_frozen=False), , TensorLocations=_TensorLocationOptions(location_optimizer={'onChip': 0}, _warnings={}, _warnings_disabled=set(), _is_frozen=False), , Training=_TrainingOptions(gradient_accumulation=10, accumulation_and_replication_reduction_type=<ReductionType.Mean: 1>, meanAccumulationAndReplicationReductionStrategy=<MeanReductionStrategy.Post: 1>, _popart_options=_PopartOptions(instrumentWithHardwareCycleCounter=False, rearrangeAnchorsOnHost=False), _warnings={}, _warnings_disabled=set(), _is_frozen=False), , _Popart=_PopartOptions(instrumentWithHardwareCycleCounter=False, rearrangeAnchorsOnHost=False))
We are ready to start training!
training_model = get_training_model(train_opts, model)
train(training_model, training_data)
Epoch 1/3
Graph compilation: 100%|██████████| 100/100 [01:31<00:00]
Loss:0.1422 | Accuracy:95.78%: 100%|██████████| 15/15 [01:37<00:00, 6.49s/it]
Epoch 2/3
Loss:0.0909 | Accuracy:97.10%: 100%|██████████| 15/15 [00:00<00:00, 15.04it/s]
Epoch 3/3
Loss:0.0707 | Accuracy:97.80%: 100%|██████████| 15/15 [00:01<00:00, 14.89it/s]
Inference
Let’s define our test function.
def test(inference_model, test_data):
nr_steps = len(test_data)
sum_acc = 0.0
for data, labels in tqdm(test_data, total=nr_steps):
output = inference_model(data)
sum_acc += accuracy(output, labels)
print(f"Accuracy on test set: {sum_acc / len(test_data):0.2f}%")
After training, we test it using the inference model.
Since weights in model.parameters() will be copied implicitly,
the inference model takes the parameters from the trained model.
We will also reuse the PopTorch options from the training model except we will disable gradient accumulation since we are not training.
The inference batch-size was set to 8. To improve performance, we increase device_iterations to 100, which pushes more mini-batches into the inference pipeline.
inf_options = train_opts.clone()
inf_options.Training.gradientAccumulation(1)
inf_options.deviceIterations(inference_iterations)
inference_model = poptorch.inferenceModel(model, inf_options)
Finally, run the inference.
test(inference_model, test_data)
Graph compilation: 100%|██████████| 100/100 [00:35<00:00]
100%|██████████| 12/12 [00:40<00:00, 3.37s/it]Accuracy on test set: 98.41%
How to run the example script
Prepare the environment.
Install the Poplar SDK following the instructions in the Getting Started guide for your IPU system. Make sure to run the
enable.shscripts for both Poplar and PopART and activate a Python virtual environment with PopTorch installed.Then install the package requirements:
python3 -m pip install -r requirements.txt
Run the program. Note that the PopTorch Python API only supports Python 3. Data will be automatically downloaded using Torchvision utils.
python3 mnist_pipeline.py
The program has a few command-line options:
-hShow usage information.--batch-sizeSets the mini-batch size for training. Default: 40.--device-iterationsNumber of device iterations for training. Default: 10.--test-batch-sizeSets the batch size for inference. Default: 8.--epochsNumber of epochs to train for. Default: 3.--learning-rateLearning rate of the optimiser. Default (tuned for AdamW): 0.001.--profileEnable profiling.--profile-dirSelect a directory to save the profile (default: ./profile).--profile-dirSelect a directory to save the profile. Default: ./profile.--strategySets the execution strategy (pipelined, sharded). Default: pipelined.--debugPrints out the debug logging while running.--offload-optimiserSet this option to offload the optimiser state.
Among these input arguments, --strategy and --offload-optimiser
are associated with the execution methods.
Some example command lines using different command-line options:
python3 mnist_pipeline.py --learning-rate 0.002 --debug --epochs 5
python3 mnist_pipeline.py --profile --profile-dir pipeline_profile
python3 mnist_pipeline.py --strategy sharded --profile --profile-dir sharding_profile
python3 mnist_pipeline.py --offload-optimiser
Conclusion
In this tutorial we achieved model parallelism on multiple IPUs with the PopTorch pipelining API.
The model was partitioned to define the pipeline stages. Then, the pipelined execution strategy was set in the poptorch.Options() object.
We generated profiles and used the Popvision Graph Analyser to visualise the execution trace and the memory use on IPUs.
The graph profiles help to identify imbalances between stages.
This information is key to choosing a model partitioning that will reduce the time IPUs spend idle before synchronisation.
Additionally, memory use on the IPU was reduced at the expense of execution time by offloading optimiser-specific tensors to the host.
This trade-off is worth considering if you need to fit memory intensive models on the IPU.
To continue your journey with the Graphcore IPU you may want to look at the Graphcore examples repository which contains implementations of standard deep learning models optimised for the IPU. You will find, amongst others: convolutional neural networks, BERT, mini DALL-E, and ViT models.
If you are looking to port and optimise your own model, the memory and performance optimisation guide will help you make the most of the hardware. Finally the TensorFlow pipelining tech note contains additional information on the core concepts required to optimise your pipelined model.
Generated:2022-09-27T15:33 Source:walkthrough.py SDK:3.0.0+1145 SST:0.0.8